








初めてシリーズ
初めて⑥-リアルタイムシステムI/Fを開発(2002~2003年)
「初めてシリーズ」の6回目、リアルタイムシステムの開発についてです。
CarSimは計算速度が速くPC上で実時間より早く計算が終了するので、HILS用途のリアルタイムシステム上でも計算速度の面ではクリアしていましたが、当時のリアルタイムOS上ではC言語のI/O関数の不備などで計算実行ができませんでした。
そんな中で、QNXというI/O関数を備えたリアルタイムOS上で動くカナダOpal社のRT-LABというリアルタイムシステム上でCarSimのソルバーを動かせることがわかり、先ずはメカニカルシミュレーション社からCarSimのRT-LAB版がリリースされました。そこで、わが社はCarSimのRT-LAB版を利用したABSのHILSのデモシステムを試作しました。
 運転装置付きABS HILSのデモシステム
運転装置付きABS HILSのデモシステムその後、RT-LinuxというリアルタイムOS上で動く日本のA&D社製AD5410や富士通テン社製CRAMASで動かせるように、両社と協力して日本でRT-Linux 用I/Fを開発し、両社のリアルタイムシステム上でCarSimのソルバーが動くようにしました。
さらに、当時よりメジャーなドイツのdSPACE社のリアルタイムシステム上で動くように、当時の日本のdSPACE代理店と協力して日本でdSPACE用のI/Fを開発し、dSPACE DS1005リアルタイムシステム上で動くようにしました。
これにより、お客様が好みのリアルタイムシステムを選択してCarSimの車両運動モデルを使ったHILSシステムを組めるようになりました。
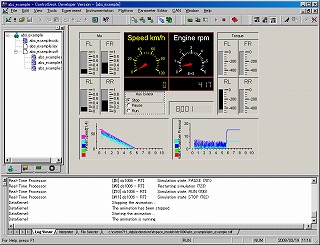 dSPACEシステムでの実行例
dSPACEシステムでの実行例